")
Fabrication d’un simulateur de chirurgie rétinienne à bas coût

Related content
Dans la formation en chirurgie, la simulation permet de développer ses compétences loin du patient. Ce simulateur à bas coût a été mis au point pour les futurs chirurgiens de la rétine.
Il est important d’apprendre de nouvelles compétences chirurgicales dans un environnement sûr, non stressant, qui ne met pas le patient en danger. L’apprentissage d’une nouvelle technique durant une opération sur un patient augmente les risques de complications et rend l’exercice stressant pour l’apprenti-chirurgien. Les deux autres acteurs, le formateur, mais surtout le patient, sont eux aussi en situation de stress.
La simulation chirurgicale crée un environnement d’apprentissage sans risque pour le patient et sans stress pour le chirurgien. Des simulateurs de chirurgie rétinienne sont désormais disponibles sur le marché. Malheureusement, le coût de ce type de technologie en limite l’accès dans les pays à revenu faible ou intermédiaire. De même, les yeux artificiels destinés à la formation sont onéreux et leur réutilisation peut être limitée. Pour ces raisons, nous avons construit un modèle d’oeil simple, très bon marché, qui peut être utilisé sous un microscope permettant de visualiser la rétine, pour développer chez les apprenants la dextérité d’utilisation des instruments de chirurgie rétinienne. Le coût du modèle est inférieur à 20 dollars US et il peut être fabriqué en quelques heures. Le modèle complet est présenté à la Figure 1a.
Construction de la base du simulateur
Matériel nécessaire (Figure 1b)

- Trois morceaux de bois pour la base et le « front », chacun de 15 cm x 7 cm x 2 cm.
- Un tube ou tuyau en plastique de 40 mm de diamètre interne, pour simuler l’orbite. Un tuyau en PVC de 40 mm de diamètre est trop étroit, mais un raccord pour conduite en PVC de 40 mm de diamètre fonctionne parfaitement. Ce tube va servir d’anneau de soutien pour la balle de ping-pong ; la balle sera soutenue et pourra tourner librement dans toutes les directions.
- Une guirlande électrique à piles (par ex. guirlande de Noël).
- De la pâte adhésive repositionnable.
Consignes de fabrication
- En vous référant à la Figure 1b, collez deux des morceaux de bois ensemble pour créer le « front » et utilisez le dernier pour créer une plateforme pour poser l’anneau (« l’orbite »).
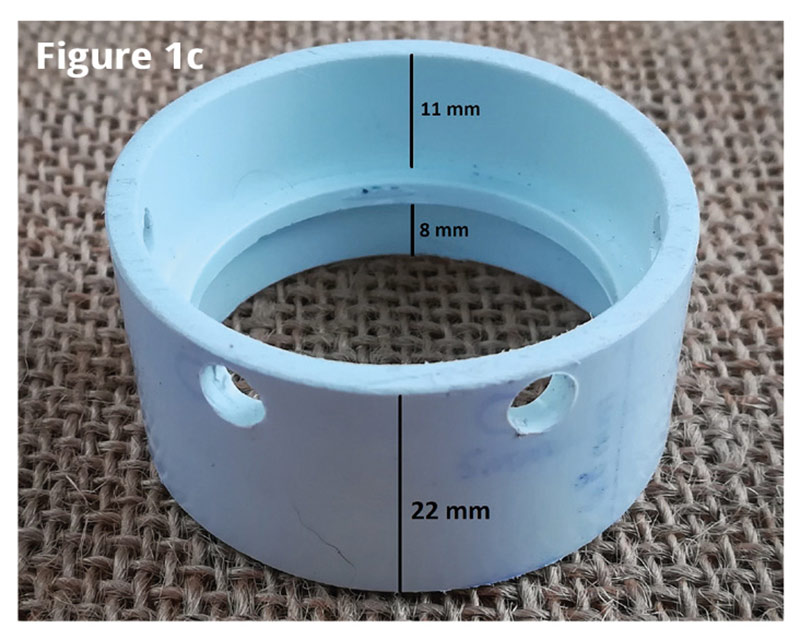
- Coupez le raccord de conduite à la bonne longueur (environ 22 mm). S’il y a une « nervure » interne dans votre raccord de conduite, je suggère alors de couper le raccord à 1
- 1 mm au-dessus de la nervure et 8 mm en dessous de celle-ci (Figure 1c).
- Lorsqu’elle est placée dans l’anneau de soutien, le haut de la balle doit se situer juste en dessous du niveau du « front », pour que les mains du chirurgien soient dans la même position qu’elles le sont durant un geste chirurgical.
- Percez des trous de 5 mm de diamètre à 2–3 mm du haut de l’anneau de soutien, dans lesquels seront fixées les ampoules de la guirlande (Figure 1c). Nous recommandons au moins trois ou quatre ampoules.
- Collez l’anneau de soutien sur sa plateforme.
- Utilisez les trois ou quatre ampoules les plus proches des piles. Le reste de la guirlande électrique peut être coupé et les extrémités sécurisées avec du ruban adhésif isolant. Placez les ampoules dans les trous que vous avez percés et maintenez-les en place avec de la pâte adhésive repositionnable. Elles ne doivent pas dépasser des trous afin de ne pas empêcher la rotation de la balle (Figure 1d). Une autre solution consiste à placer les ampoules dans des trous faits dans la balle (visibles dans la Figure 1a ; cependant le poids du fil électrique tend alors à entraver la balle).

Préparation des balles pour les tâches d’apprentissage

Matériel nécessaire (Figure 2a)
- Trois balles de tennis de table ou ping-pong normales de 40 mm de diamètre qui serviront d’yeux. Chacune des balles va servir à enseigner une tâche d’apprentissage différente.
- Un morceau de bois et un morceau d’éponge de 10 mm d’épaisseur, taillés ou coupés pour rentrer à l’intérieur de la partie inférieure de la balle. Ils serviront à rehausser le fond de la balle, pour que les instruments chirurgicaux standard puissent atteindre la zone de la tâche d’apprentissage.
- Un morceau fin de caoutchouc de silicone non adhésif découpé dans un moule à muffins (que vous trouverez dans le rayon cuisine ou pâtisserie des boutiques de produits pour la maison), et de la même taille que la surface du morceau de bois.
- Un morceau de gomme et deux aiguilles à coudre.
- Du fil de coton.
- Un morceau de câble électrique multibrin.
- De la pâte adhésive repositionnable.
- Pansement à pulvériser. Nous avons utilisé Opsite Spray®, qui coûte 20 dollars US le flacon de 100 ml et permet de faire plusieurs membranes.
Consignes de fabrication

- Utilisez une petite perceuse ou un fer à souder (qui fond facilement le plastique) pour percer une « pupille » de 7 mm de diamètre dans chaque balle de ping-pong. Tracez la position du limbe autour de la « pupille ».
- À 3,5 mm du limbe, soit la position anatomique normale de la pars plana, à l’aide d’une aiguille hypodermique de calibre 18, faites de petits orifices pour faire passer les instruments. Agrandissez-les au besoin pour que l’apprenti ne ressente aucune friction lorsqu’il tiendra les instruments.
- Découpez une grande fente (35 mm x 10 mm) sur le côté de la balle juste en dessous de son équateur pour insérer le matériel nécessaire aux tâches d’apprentissage (Figure 2b).
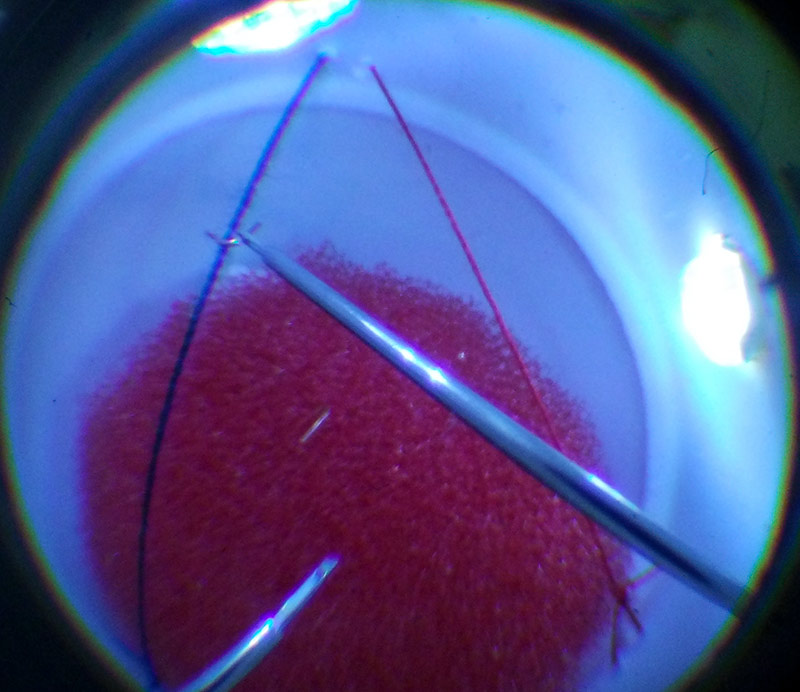
- Pour préparer la première balle (Figure 3a), utilisez l’aiguille pour faire passer le fil de coton à l’intérieur de la balle. Insérez une éponge dans le fond de la balle.
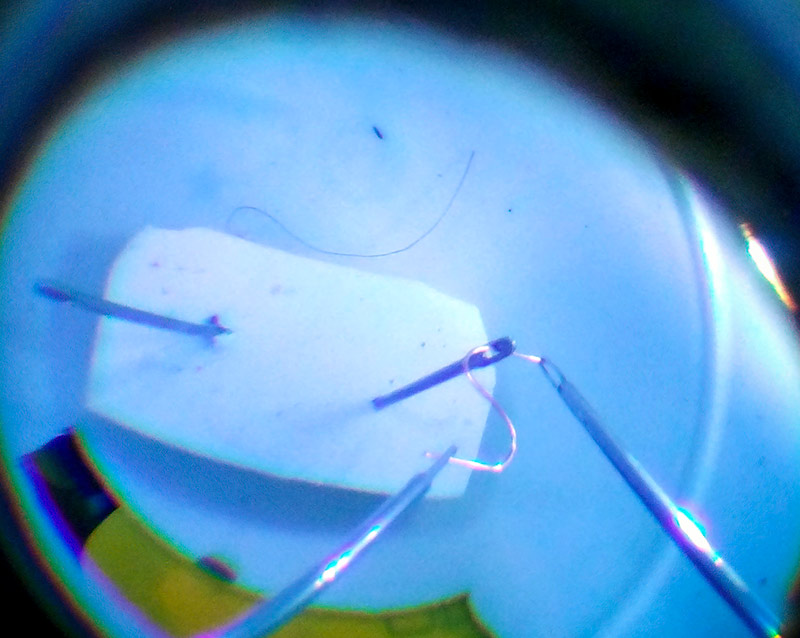
- Pour la deuxième balle, utilisez de la pâte adhésive repositionnable pour fixer la gomme dans le fond de la balle. Insérez les deux aiguilles à coudre et placez-les légèrement en oblique (Figure 3b).
- Pour la troisième balle, placez une fine couche uniforme de pâte adhésive sur le dessus du morceau de bois. Insérez-le et fixez-le dans la balle avec de la pâte adhésive.
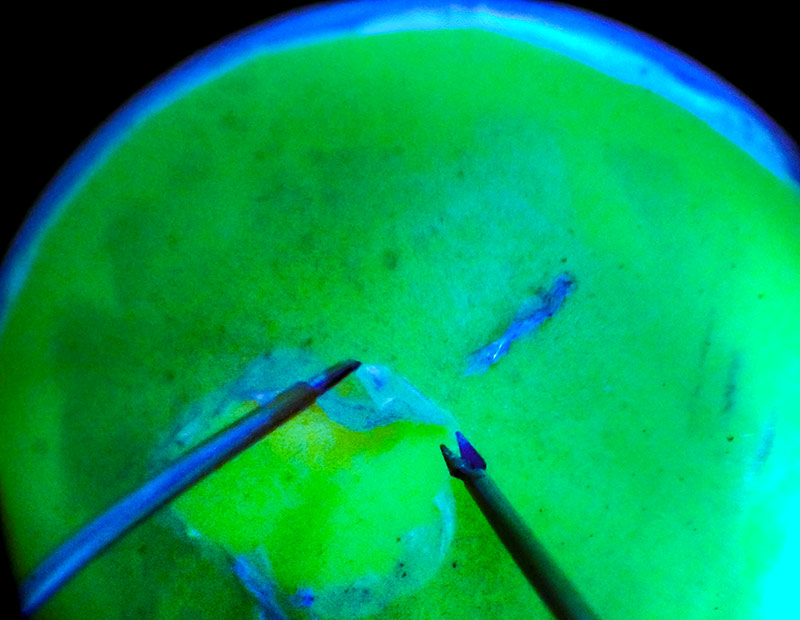
- Pour préparer la membrane, pulvérisez une fine couche de pansement à pulvériser sur le morceau de caoutchouc de silicone non adhésif. Coloriez la membrane avec un feutre et entaillez-la précautionneusement avec une lame de rasoir. La membrane se détache facilement en bandes faciles à visualiser. Une membrane non taillée sera utile pour les tâches bimanuelles.
- Glissez avec précaution le morceau de caoutchouc de silicone avec sa membrane dans la fente latérale et placez-le sur le dessus du morceau de bois. À l’aide d’un crayon à papier passé au travers de la « pupille », tapotez sur le morceau de caoutchouc de silicone pour le fixer. La fine couche de pâte adhésive maintiendra le silicone en place, mais il pourra néanmoins facilement être retiré lorsque vous aurez besoin de faire une nouvelle membrane.
Utilisation du modèle
Placez le modèle sur la table d’opération et utilisez le système d’ophtalmoscopie indirecte relié au microscope opératoire. Il est facile de changer de balle en fonction de la tâche d’apprentissage à laquelle il faut s’entraîner.
Vous pouvez créer des tâches d’apprentissage qui requièrent des mouvements moteurs fins. On peut citer comme exemples de tâches :
- Faire glisser de petites boucles de fil électrique (coupées dans un des brins du câble électrique multibrin) autour des fils de coton qui ont été tendus à l’intérieur de la première balle (Figure 3a).
- Enfiler un fil électrique dans le chas d’une des aiguilles avec une seule main ou avec deux mains (Figure 3b). Découper de petites formes imprimées (Figure 3c). Cet exercice peut être fait sur toutes les balles.
- Manipuler une membrane fine (Figure 3d).
- Déplacer une boucle le long d’un fil électrique tordu avec un indicateur lumineux (la fabrication de cette balle est précisée dans un autre document1) (Figures 3e et 3f).



Conclusion
Même si le modèle n’enseigne pas de procédures spécifiques (comme le traitement du décollement de rétine), il crée un environnement chirurgical réaliste. Il permet à l’apprenant de travailler avec de vrais instruments de chirurgie rétinienne et d’apprendre le contrôle de la motricité fine. Nos apprenants ont également estimé que le modèle était utile pour apprendre à s’orienter avec le système d’ophtalmoscopie indirecte, notamment pour apprendre à ajuster le champ et le grossissement avec les pédales de pied, à aligner le microscope avec la rotation du globe et pour apprendre les effets du manche de l’instrument sur la rotation du globe.
Le temps nécessaire pour réaliser les tâches d’apprentissage va s’améliorer avec la pratique. Si le microscope est équipé d’un deuxième oculaire, un formateur peut observer l’apprenant et enseigner le contrôle de l’instrument.
Une description complète avec vidéos est publiée dans un autre article2. Une étude de validation formelle de l’utilité de ce modèle comme outil d’apprentissage est en cours.
Références
1 Rice JC, van der Westhuizen D, Lin A. Miniature tremor toy for retinal trainees SA Ophthalmology Journal. Autumn 2019; 14(2): 28–29.
2 Rice JC, Steffen J, du Toit L. Simulation Training in Vitreoretinal Surgery: A Low-Cost, Medium-Fidelity Model. Retina. 2017 Feb;37(2):409-412.